Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.

Autor: Jan Machowski, Zbigniew Lubośny
Wydawnictwo: Wydawnictwo Naukowe PWN
Stron: 920
Data wydania: 2018-08-22
Typ: książka
Druk: tak
Wersja elektroniczna: nie
ISBN:
978-8-30-120006-0
22-08-2018
16.5 x 23.5 cm
nie
nie
nie
System elektroenergetyczny jest to zbiór urządzeń przeznaczony do wytwarzania, przesyłu, rozdziału, magazynowania i użytkowania energii elektrycznej, połączonych ze sobą w system umożliwiający realizację dostaw energii elektrycznej na terenie kraju w sposób ciągły i nieprzerwany.
Publikacja dwóch ekspertów z dziedziny elektroenergetyki – prof. Jana Machowskiego i prof. Zbigniewa Lubośnego - traktuje o stabilności pracy takich systemów. Prezentuje podstawy teoretyczne, niezbędną wiedzę matematyczną, opisuje zjawiska fizyczne zachodzące w systemie elektroenergetycznym pod wpływem zakłóceń, omawia modele matematyczne do symulacji tych zjawisk i badania stabilności oraz optymalizacji układów regulacyjnych i doboru środków poprawy stabilności.
Książka stawia duży nacisk na przystępne wyjaśnienie zjawisk zachodzących w systemie elektroenergetycznym pod wpływem zakłóceń oraz opis modeli i metod badania stabilności stosowanych w praktyce. Czytelnik będzie mógł zapoznać się w niej z licznymi przykładami obliczeniowymi.
Sięgnąć po nią powinni studenci i doktoranci uczelni technicznych na kierunkach Elektrotechnika i Energetyka specjalizujący się w Elektroenergetyce oraz praktycy - operatorzy sieci przesyłowych, projektanci i planiści sieci przesyłowych oraz inni specjaliści z dziedziny elektroenergetyki.
W środowisku elektryków badanie zakłóceń i stabilności systemu elektroenergetycznego uważane jest za bardzo trudne. Na przekór tym poglądom (…) autorzy przedstawiają bardzo przystępny wykład z szerokiego zakresu zagadnień począwszy od zjawisk fizycznych poprzez ich modelowanie aż do metod badawczych. (…) W publikacji bardzo szeroko opisane zostały nowe problemy i zagadnienia pojawiające się przy eksploatacji SEE. Problemy te dotyczą m.in.: wykorzystywania urządzeń FACTS w różnych celach, wpływu farm wiatrowych, elektrowni fotowoltaicznych, układów przesyłu energii elektrycznej prądem stałym na pracę i stabilność SEE. Przedstawiono istotne zagadnienie optymalizacji parametrów układów regulacyjnych pracujących w SEE. Opisano nowoczesny układ pomiarowy WAMS, służący m.in. do monitorowania i tłumienia kołysań elektromechanicznych w SEE oraz detekcji powstawania pracy wyspowej w systemie. - prof. dr hab. inż. Stefana Paszek, Politechnika Śląska
Wykaz używanych skrótów
1. Wiadomości ogólne
1.1. Rodzaje stabilności SEE
1.2. Jednostki względne
1.3. Schematy zastępcze generatorów synchronicznych
1.3.1. Obrazy strumieni i reaktancje zastępcze
1.3.2. Wykresy fazorowe generatora synchronicznego
1.3.3. Zmiany sił elektromotorycznych po zakłóceniu
1.3.4. Równanie ruchu wirnika
1.4. Równania sieci WN
1.4.1. Schematy zastępcze linii
1.4.2. Schematy zastępcze transformatorów
1.4.3. Pojedynczy element indukcyjny
1.4.4. Równania węzłowe
1.4.5. Linearyzacja równań węzłowych
1.4.6. Zmiana układu współrzędnych
1.4.7. Wyznaczanie punktu pracy SEE
2. Stabilność kątowa układu generator–sieć sztywna
2.1. Charakterystyka mocy w stanie ustalonym
2.2. Stan równowagi
2.3. Stabilność kątowa lokalna
2.3.1. Metoda małych zakłóceń
2.3.2. Charakterystyka mocy w stanie przejściowym
2.3.3. Metoda równych pól
2.3.4. Kołysania po zakłóceniu mocy mechanicznej
2.3.5. Rozwiązanie równania ruchu
2.3.6. Wpływ regulacji napięcia
2.4. Stabilność kątowa przejściowa
2.4.1. Wpływ czasu trwania i rodzaju zwarcia
2.4.2. Wpływ obciążenia układu przed zwarciem
2.4.3. Wpływ odległości zwarcia
2.4.4. Zwarcie likwidowane w cyklu SPZ
2.4.5. Kołysania mocy
2.4.6. Wpływ regulacji napięcia
2.4.7. Proste kryterium do analiz przybliżonych
2.4.8. Bezpośrednia metoda Lapunowa
2.5. Praca asynchroniczna i resynchronizacja
2.5.1. Moc asynchroniczna
2.5.2. Charakterystyka turbiny
2.5.3. Punkt równowagi pracy asynchronicznej
2.5.4. Przejście do pracy asynchronicznej
2.5.5. Zmiany wartości elektrycznych w trakcie pracy asynchronicznej
2.5.6. Możliwości resynchronizacji
2.5.7. Wpływ regulacji napięcia generatora i mocy turbiny
2.5.8. Identyfi kowanie pracy asynchronicznej
2.6. Środki poprawy stabilności kątowej
2.6.1. Stabilizatory systemowe
2.6.2. Szybka regulacja turbin parowych
2.6.3. Wyłączanie części generatorów
2.6.4. Hamowanie elektryczne
2.6.5. Wykorzystanie bocznikowych urządzeń FACTS
2.6.6. Wykorzystanie kompensatorów szeregowych FACTS
2.6.7. Wykorzystanie UPFC
3. Stabilność napięciowa układu źródło–odbiór
3.1. Odbiory kompleksowe
3.2. System elektroenergetyczny jako źródło
3.3. Warunek stabilności napięciowej d /d Q U
3.4. Czynniki istotne dla stabilności napięciowej
3.4.1. Wpływ wzrostu obciążenia
3.4.2. Wpływ zmian w sieci
3.4.3. Wpływ kształtu charakterystyk napięciowych
3.4.4. Wpływ regulacji napięcia
3.4.5. Zjawiska towarzyszące
3.5. Inne warunki stabilności napięciowej
3.5.1. Warunek stabilności napięciowej d /d E U
3.5.2. Warunek stabilności napięciowej g d /d Q Ql
3.5.3. Krzywe nosowe
3.5.4. Proste kryterium do przybliżonych analiz
3.6. Środki poprawy stabilności napięciowej
4. Stabilność częstotliwościowa
4.1. Charakterystyki częstotliwościowe
4.1.1. Częstotliwościowa charakterystyka poboru
4.1.2. Częstotliwościowa charakterystyka wytwarzania
4.1.3. Punkt równowagi
4.2. System regulacji mocy i częstotliwości
4.2.1. Korekta czasu synchronicznego
4.2.2. Regulacja pierwotna
4.2.3. Regulacja wtórna
4.2.4. Regulacja trójna
4.3. Uproszczone modele dynamiczne
4.3.1. Model regulacji pojedynczego systemu
4.3.2. Model regulacji dwóch połączonych systemów
4.3.3. Model regulacji kilku połączonych systemów
4.4. Przebiegi nieustalone w trakcie regulacji częstotliwości
4.4.1. Etap I – kołysania wirników generatorów
4.4.2. Etap II – spadek częstotliwości
4.4.3. Etap III – regulacja pierwotna
4.4.4. Znaczenie rezerwy wirującej
4.4.5. Lawina częstotliwości
4.4.6. Etap IV – regulacja wtórna
4.5. Przebiegi nieustalone w trakcie regulacji mocy wymiany
4.5.1. Etap I i II – kołysania mocy i spadek częstotliwości
4.5.2. Etap III – regulacja pierwotna
4.5.2. Etap IV – regulacja wtórna
4.6. Działania zaradcze
4.6.1. Plan obrony
4.6.2. Automatyka SCO
4.6.3. Urządzenia UPFC lub TCPAR
5. Modele matematyczne
5.1. Modele generatorów synchronicznych
5.1.1. Równania strumieniowo-prądowe
5.1.2. Moc w układzie zastępczym
5.1.3. Równania różniczkowe strumieniowe
5.1.4. Zastępcze źródła napięciowe
5.1.5. Modele do badania stabilności
5.1.6. Połączenie z siecią
5.1.7. Przykładowe parametry
5.1.8. Wpływ nasycenia żelaza
5.1.9. Zmiana układu współrzędnych
5.2. Modele układów wzbudzenia
5.2.1. Człon pomiarowo-porównawczy .
5.2.2. Wzbudnice maszynowe prądu stałego
5.2.3. Wzbudnice maszynowe prądu przemiennego
5.2.4. Wzbudnice statyczne
5.2.5. Stabilizatory systemowe
5.3. Modele turbin i ich regulatorów
5.3.1. Turbiny parowe
5.3.2. Turbina wodna
5.3.3. Turbiny gazowe i układy kombinowane
5.4. Modele farm wiatrowych
5.4.1. Farmy i elektrownie wiatrowe
5.4.2. Model elektrowni wiatrowej z maszyną asynchroniczną
5.4.3. Model elektrowni wiatrowej z maszyną synchroniczną
5.5. Model elektrowni fotowoltaicznej
5.6. Modele elementów sieci
5.6.1. Linie przesyłowe i transformatory
5.6.2. Odbiory kompleksowe
5.6.3. Urządzenia FACTS
5.6.4. Modele łącza HVDC
6. Badanie wielomaszynowych SEE
6.1. Badanie stabilności kątowej lokalnej
6.1.1. Stabilność lokalna naturalna
6.1.2. Stabilność lokalna sztuczna
6.2. Badanie stabilności kątowej przejściowej
6.2.1. Metody przemienne
6.2.2. Metody jednoczesne
6.2.3. Porównanie metod
6.2.4. Odwzorowanie zakłóceń
6.2.5. Ocena tłumienia kołysań mocy
6.3. Bezpośrednia metoda Lapunowa
6.3.1. Funkcje energetyczne dla modeli SEE
6.3.2. Wyznaczanie krytycznego czasu trwania zwarcia
6.3.3. Sterowanie bocznikowych urządzeń FACTS
6.3.4. Sterowanie UPFC
6.3.5. Sterowanie generatorów synchronicznych
6.4. Badanie stabilności napięciowej
6.4.1. Krzywe nosowe
6.4.2. Analiza wrażliwości i analiza modalna
6.4.3. Inne metody
6.5. Stabilność w planowaniu rozwoju i pracy SEE
6.5.1. Zdarzenia planistyczne i ekstremalne
6.5.2. Standardy zachowania się SEE
6.5.3. Przykłady kryteriów ilościowych
7. Optymalizacja układów regulacyjnych
7.1. Wymagania formalne stawiane regulatorom
7.2. Metody optymalizacji regulatorów
7.2.1. Optymalizacja oparta na modelach liniowych
7.2.2. Modele klasyczne (IEEE) – regulatory napięcia generatora
7.2.3. Modele klasyczne (IEEE) – stabilizatory systemowe
7.2.4. Regulatory optymalne LQR, LQG
7.2.5. Regulatory krzepkie (odporne) H2, H∞
7.2.6. Optymalizacja oparta na modelach nieliniowych
7.2.7. Regulatory adaptacyjne
7.3. Weryfi kacja nastawień na obiektach rzeczywistych
8. Metody czasu rzeczywistego
8.1. Układy WAMS
8.1.1. Fazory
8.1.2. Struktura układu WAMS
8.2. Zastosowania układów WAMS
8.2.1. Ocena stanu pracy systemu
8.2.2. Detekcja pracy wyspowej
8.2.3. Obrona stabilności systemu
8.2.4. Tłumienie kołysań elektromechanicznych
9. Wpływ rozproszonych źródeł energii
9.1. Rozproszone źródła energii
9.1.1. Elektrownie wiatrowe
9.1.2. Elektrownie fotowoltaiczne
9.2. Inercja w systemie elektroenergetycznym
9.2.1. Zmienność inercji w systemie
9.2.2. Wpływ inercji na stabilność systemu
9.3. Wirtualna inercja
9.3.1. Idea układu wirtualnej inercji
9.3.2. Wpływ wirtualnej inercji na stabilność systemu
9.3.3. Wirtualna inercja a stabilność połączonych systemów
10. Redukcja modelu
10.1. Typy ekwiwalentów dynamicznych
10.2. Przekształcenia sieci
10.2.1. Eliminacja węzłów
10.2.2. Agregacja węzłów metodą Dimo
10.2.3. Agregacja węzłów metodą Żukowa
10.2.4. Koherencja
10.2.5. Agregacja zespołów wytwórczych
10.2.6. Model zastępczy podsystemu zewnętrznego
10.3. Rozpoznawanie koherencji
10.4. Właściwości ekwiwalentów opartych na koherencji
10.4.1. Elektryczna interpretacja agregacji Żukowa
10.4.2. Model przyrostowy
10.4.3. Modalna interpretacja dokładnej koherencji
10.4.4. Wartości własne i wektory własne modelu zastępczego
10.4.5. Punkty równowagi modelu zredukowanego
Literatura
Dodatek. Podstawy teoretyczne
D.1. Defi nicje stabilności
D.2. Układy liniowe
D.2.1. Równania różniczkowe zwyczajne
D.2.2. Równanie różniczkowe z współczynnikiem zespolonym
D.2.3. Wartości i wektory własne macierzy
D.2.4. Diagonalizacja macierzy rzeczywistej
D.2.5. Modalna postać równania różniczkowego macierzowego
D.2.6. Równanie zmiennych stanu z wymuszeniami
D.2.7. Analiza modalna układu dynamicznego
D.3. Układy nieliniowe
D.3.1. Funkcje skalarne w przestrzeni stanów
D.3.2. Druga metoda Lapunowa
D.3.3. Pierwsza metoda Lapunowa
D.4. Częściowa inwersja macierzy
D.5. Analiza Prony’ego
D.6. Wybrane prawa elektrotechniki
D.7. Ograniczniki w członach automatyki regulacyjnej
D.8. Metody całkowania numerycznego
D.9. Systemy testowe
D.9.1. System testowy 3G
D.9.2. System testowy 7G (CIGRE)
D.9.3. System testowy 10G (New England)
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
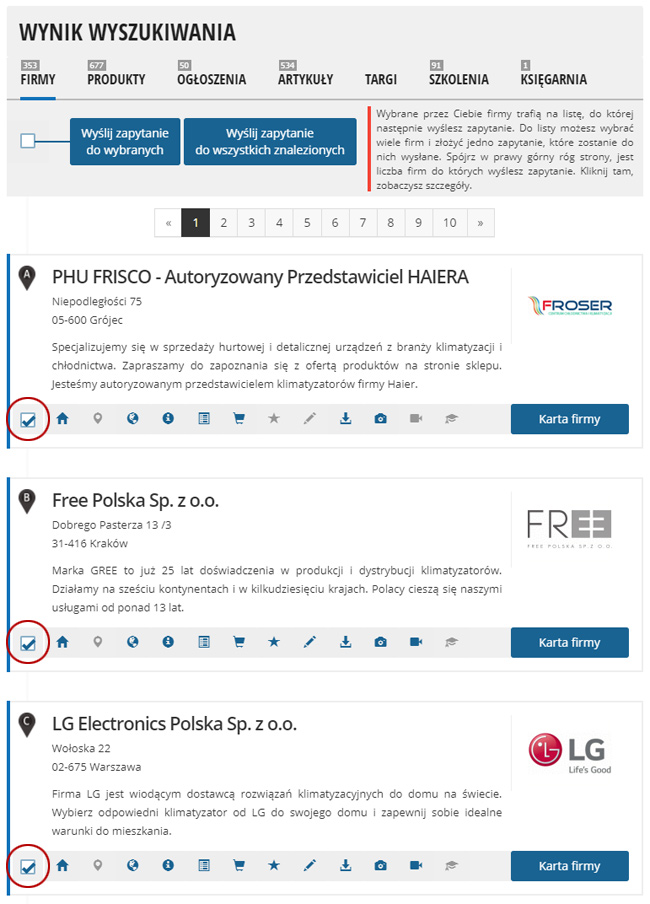
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
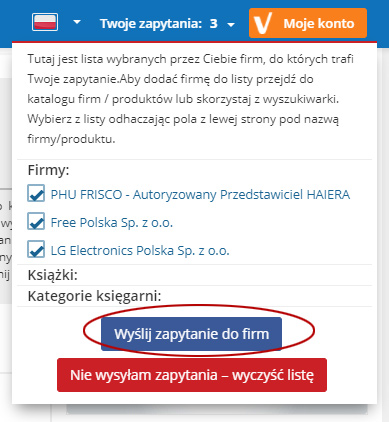
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
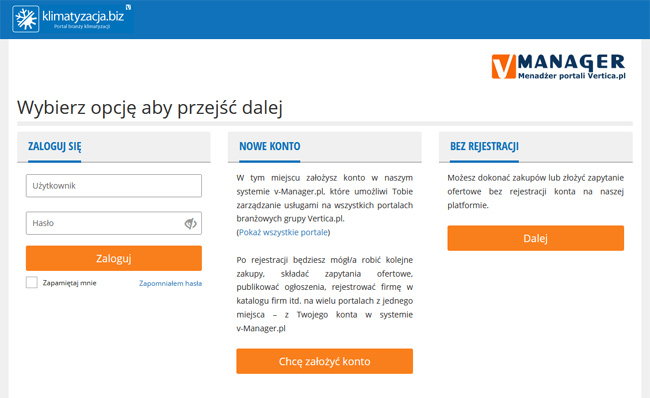
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
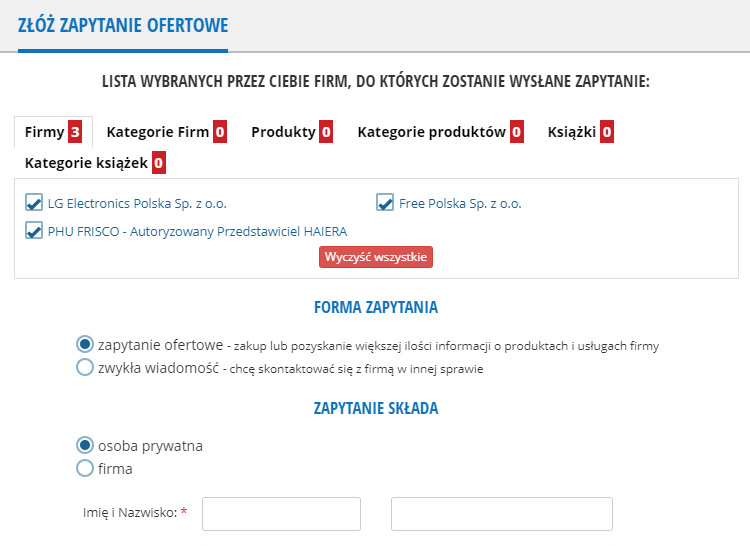
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.